TMC 5160 Pro V1.5

Основные параметры
- Напряжение питания : 24-48V
- Максимальный ток : 6A
- Поддерживаемые прошивки : Marlin/Klipper/RRF
- Режимы работы драйвера: TMC: SPI
- Интерфейс шаг/направление с микроположением microPlyer
- Максимальное разрешение 256 делений
- Поддержка тихого режима stealthChop2 и плавных действий
- Поддержка подавления резонанса на средних частотах
- Поддержка высокодинамического двигателя с斩波щиком spreadCycle
- Поддержка dcStep для управления скоростью в зависимости от нагрузки
- Поддержка stallGuard2 для точного обнаружения нагрузки без датчика
- Поддержка coolStep для контроля тока, экономия до 75%
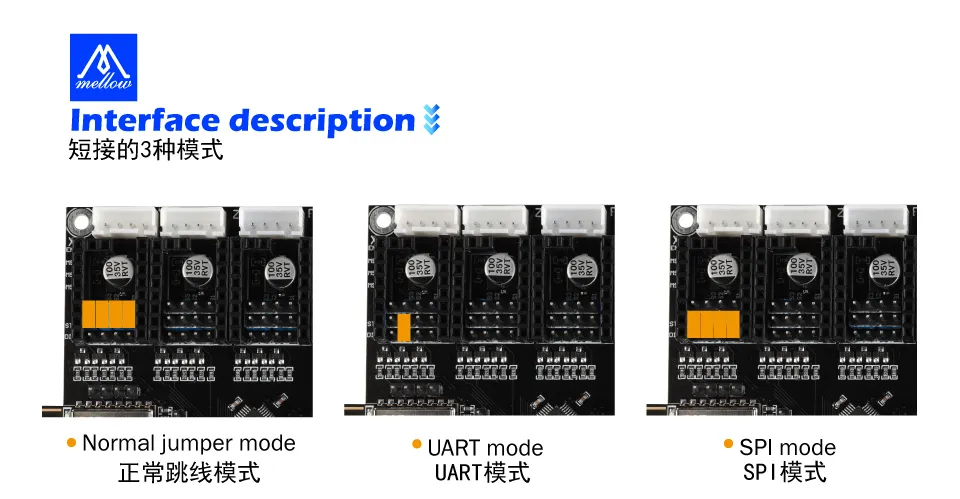
Объяснение перемычек на плате
- TMC5160 Pro использует перемычки SPI
- Пины SPI для драйвера FLY находятся на четвертом контакте слева, CS - это пин SPI. Если на плате нет соответствующего контакта, использовать SPI невозможно
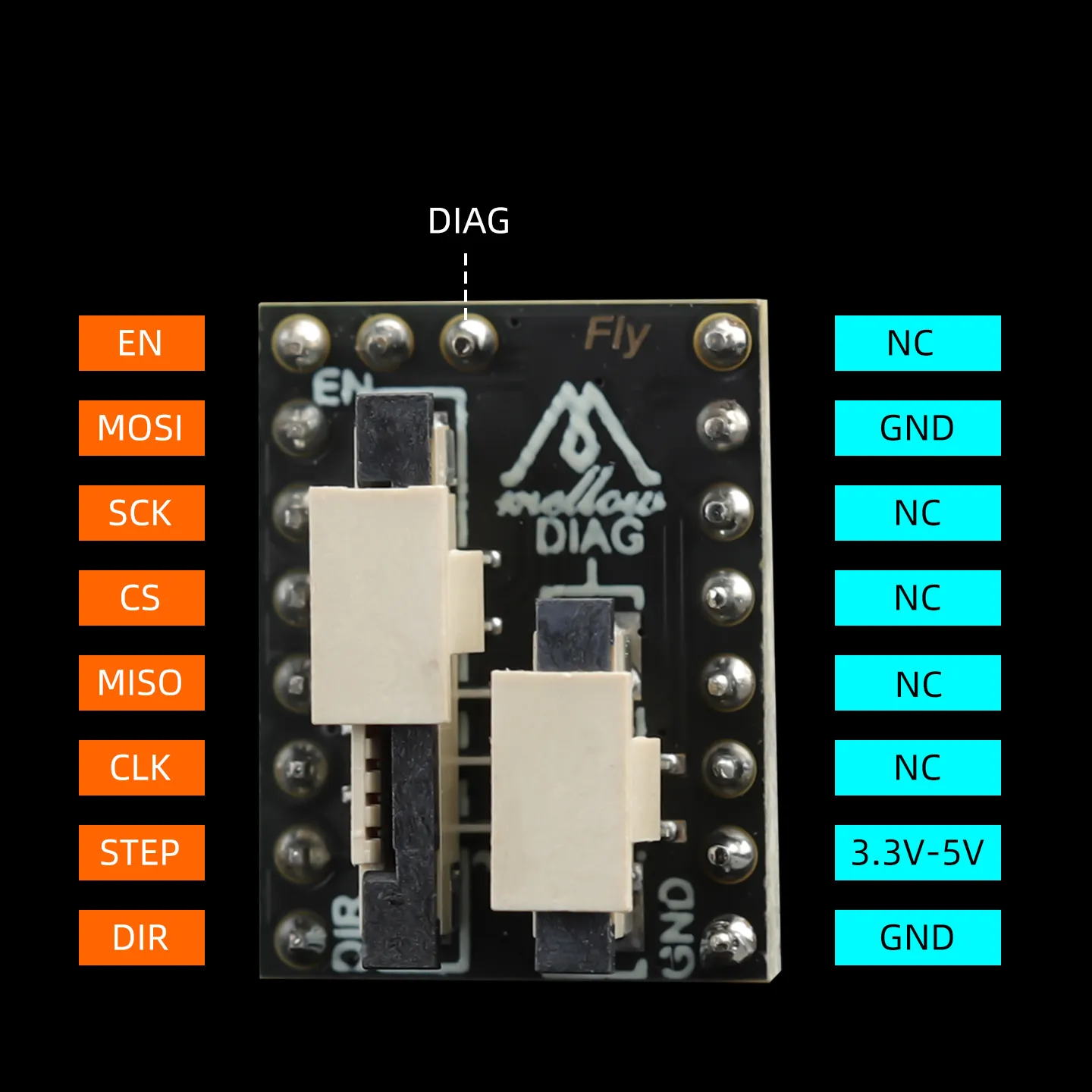
Выводы малой платы
- Обратите внимание, что входное напряжение питания драйвера на плате составляет 12V-24V
Установка FPC на плату
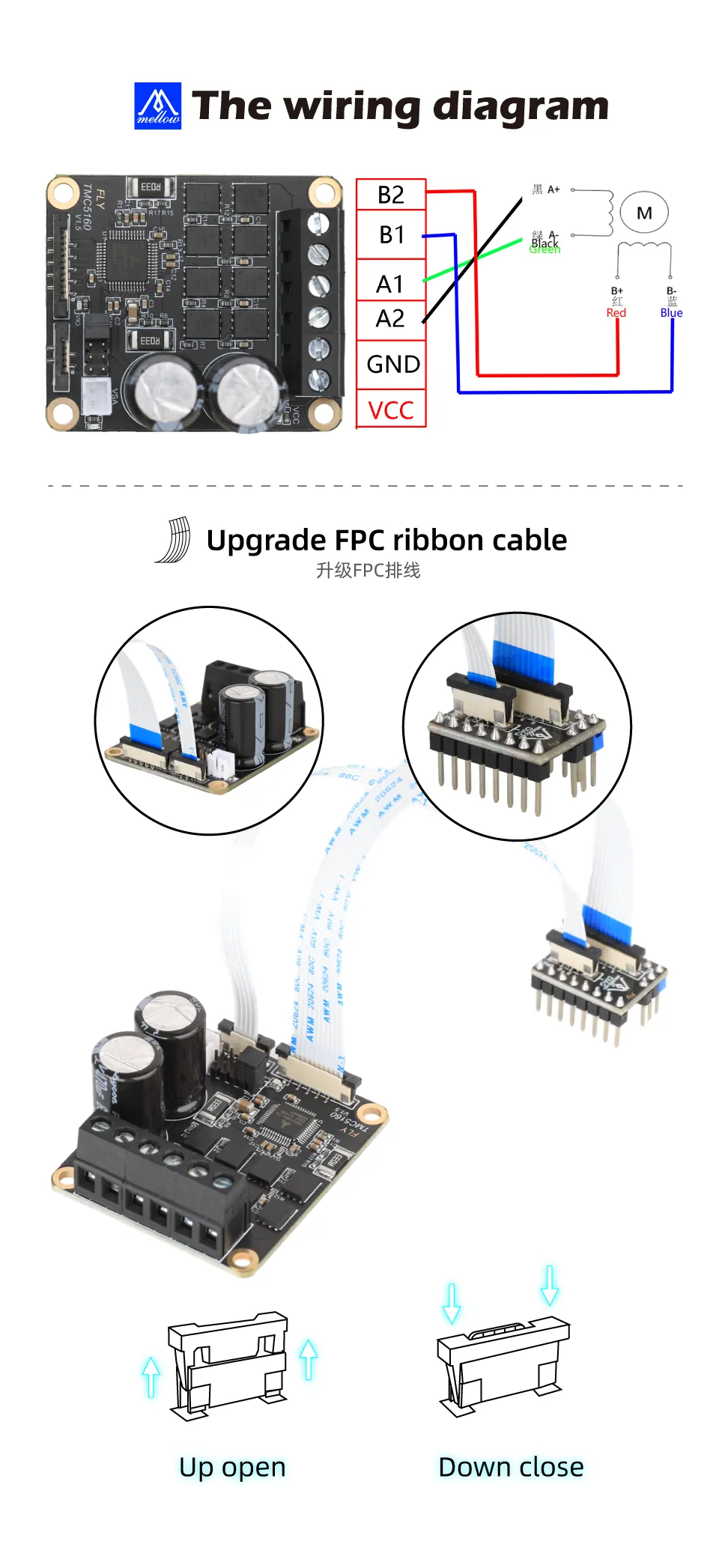
Подключение 12 Вентилятора

Конфигурация TMC5160 Pro
осторожно
- Сопротивление измерения драйвера -
sense_resistor: 0.033, не устанавливайте неправильно - Только один из spi_bus или spi_software может быть выбран
Пример конфигурации в режиме SPI
[tmc5160 stepper_x]
cs_pin:
spi_bus:
# spi_software_mosi_pin:
# spi_software_miso_pin:
# spi_software_sclk_pin:
run_current: 1.0 # Ток двигателя при работе
interpolate: False # Включить ли 256 микрошагов (включить - True, выключить - False)
sense_resistor: 0.033
stealthchop_threshold: 0
driver_DISS2G: 1
driver_DISS2VS: 1
Инструкция по использованию бесконечной точки
:::подсказка Использование без ограничений
- Использование без ограничений требует использования одного порта ограничения, обычное использование: первый драйвер использует IO1, второй драйвер использует IO2 и т.д.
- При использовании без ограничений обратите внимание, не подключайте ничего к соответствующим портам ограничений
- На некоторых материнских платах FLY драйверы подключаются напрямую, обратите внимание на прямое подключение DIAG к соответствующим выводам
:::
Советы по использованию бесконечной точки
- Для использования этой платы необходимо установить 4-контактный FPC
- Старый
endstop_pin:должен быть отключен или удален, добавьтеendstop_pin: tmc5160_stepper_x:virtual_endstop - После настройки
diag0_pin:состояние конечной точки не активировано - После настройки
driver_SGT:вам нужно самостоятельно подобрать подходящее значение
- Пример конфигурации
[stepper_x]
# endstop_pin:
endstop_pin: tmc5160_stepper_x:virtual_endstop
homing_retract_dist: 0 # Не изменяйте на 0, иначе может не сработать
[tmc5160 stepper_x]
diag0_pin: ^!
driver_SGT: 1
# После настройки убедитесь, что состояние конечной точки не активировано
# Этот вывод обычно использует префикс "^", чтобы включить внутренний подтягивающий резистор
# Чувствительность зависит от натяжения ремня, ее нужно настроить самостоятельно
# (убедитесь, что установлен driver_SGTHRS на подходящее значение чувствительности)
Loading...